한국생산기술연구원(이하 생기원)이 ㈜코보시스, ㈜화인특장과 동동으로 무인 자동화 스마트팜 정식(定植)로봇을 개발했다.
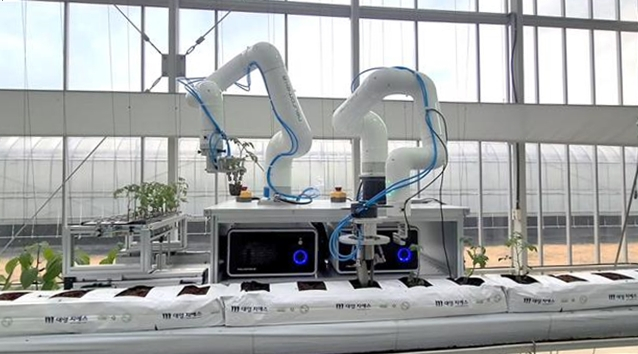
스마트팜에서 자율주행하며 정식작업을 수행중인 로봇. 한국생산기술연구원 정식은 식물을 다른 장소에 옮겨 심는 작업으로, 스마트팜 농가에서는 사람이 모판을 들고 다니며 인공토양인 코코피트 배지(培地)에 모종을 수작업으로 옮겨 심는다.
여린 모종을 단단한 배지에 옮겨 심는 작업은 섬세한 근력이 요구돼 인력을 대체할 기계화가 매우 어려웠다.
이번에 개발한 정식로봇은 두 개의 로봇팔과 자율주행 이동체로 구성, 한 쪽 로봇 팔이 모판에서 모종을 뽑고 다른 팔로 재배용 배지를 파낸 후 모종을 옮겨 심을 수 있다.
정식로봇은 모판에서 모종의 위치를 스스로 파악해 한 개씩 뽑아내고, 옮겨 심을 배지 위치를 인식해 파낸 후 뽑은 모종을 심는 순서로 작업을 진행한다.
2개의 로봇 팔로 모종을 이식하는 정식로봇. 한국생산기술연구원 이를 위해 연구팀은 정식로봇이 모종 위치와 정식할 배지의 위치를 정확히 인식할 수 있는 것도록 인공지능(AI)을 활용한 영상인식 기술을 적용했다.
특히 스마트팜 농가에서 가장 많이 재배하는 토마토와 파프리카 모종의 다른 형상은 물론 같은 품종이라도 모양이 미세하기 다른 것을 구분하기 위해 AI 학습으로 잎과 줄기의 모양, 숫자, 높이 등을 구분해 인식토록 했다.
또 코코피트 배지가 길이, 두께, 비닐무늬와 색상, 모종 구멍 크기 등 개별 특성을 파악해 위치를 인식하고 로봇팔이 이를 스스로 찾아 작동토록 자동화를 구현했다.
스마트팜 정식로봇이 옮겨 심은 토마토 모종. 한국생산기술연구원 양승환 생기원 수석연구원은 “정식로봇이 구현된 자율주행 이동체는 다양한 스마트팜 농업에 적용할 수 있다”며 “이를 토대로 청소로봇, 적엽로봇, 방제로봇, 인식로봇 등을 순차적으로 개발·공개할 계획”이라고 밝혔다.
한편 이번 정식로봇은 지난주 미국 라스베이거스에서 열린 ‘2024 CES(국제가전박람회’에서 최초 공개, 미국 로봇전문기업과 공급 양해각서를 체결하는 성과를 올렸다.